通过雷射扫描可以得到汽车周围环境的3D模型,运用相关算法比对上一帧和下一帧环境的变化可以较为容易的探测出周围的车辆和行人 。GPS、IMU和轮速等传感器给出一个初始(大概)的位置 。
本视频由华为MateBook D15、Windows 11、录制
品牌型号:华为MateBook D15
系统:Windows 11
软件版本:
文章插图
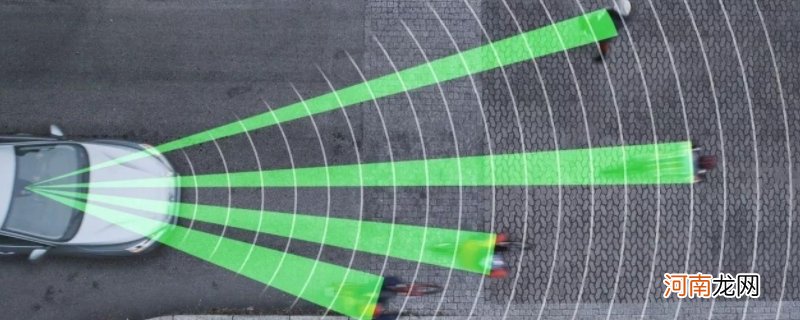
通过雷射扫描可以得到汽车周围环境的3D模型,运用相关算法比对上一帧和下一帧环境的变化可以较为容易的探测出周围的车辆和行人 。
GPS、IMU和轮速等传感器给出一个初始(大概)的位置 。其次,将激光雷达的局部点云信息进行特征提取,并结合初始位置获得全局坐标系下的矢量特征 。最后,将上一步的矢量特征跟高精地图的特征信息进行匹配,得出精确的全球定位 。
【无人车车顶上的激光雷达传感器的作用是优质】激光雷达的工作原理是利用可见和近红外光波(多为950nm波段附近的红外光)发射、反射和接收来探测物体 。激光雷达可以探测白天或黑夜下的特定物体与车之间的距离 。由于反射度的不同,也可以区分开车道线和路面,但是无法探测被遮挡的物体、光束无法达到的物体,在雨雪雾天气下性能较差 。
- 驾龄不够,私家车。超龄车,公司车怎么注册曹操专车车主
- 曹操专车车主怎么注册加盟,车型不符注册方法
- 在狗市,只要30元一只的中华田园幼犬,为何半天无人购买?
- 午后的狗市显得有些清冷,商贩出售的拉布拉多幼犬无人问津!
- 无人潜艇发现 南极洲“末日冰川”恐将脱离大陆
- 旧车车内异味严重怎样清除?车里的异味怎样快速的去除
- 女星富田真由遭砍20多刀陷昏迷 无人出手相救
- 亨氏婴儿营养米粉上海无人问津 遭顾客变相封杀
- 翼龙无人机是哪个公司生产的
- 厢式货车厢坏了去哪里修?货车车厢变形修理要多久