文章插图
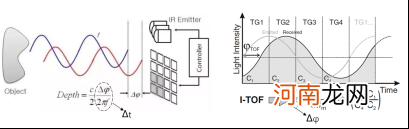
连续波调试iToF示意图 [1]

文章插图
脉冲波调试iToF示意图[2]
在iToF技术中,系统的测距精度与调制光波的相位差解析精度成正比,系统的测距范围与调制光波的频率成反比 。频率越低,虽然测距范围增大了,但会带来相位差的解析精度下降,进而测距精度随之下降,因此iToF的测距精度随距离增加而下降 。在一些产品中,为了平衡这一矛盾,采用了双频或者多频的技术,即在不同距离采取不同的调制频率,不过这就增加了系统复杂度,而且当场景中存在深度跨度比较大的情况下,仍然会出现问题 。而dToF由于技术原理不同,则天然不存在此问题 。
文章插图
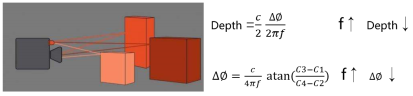
iToF距离与测距精度的矛盾关系
此外,iToF技术中的相位差本质上是通过iToFCMOS sensor所采集不同时间窗口的接收光能量比值关系得到的,因此属于传统的光子能量积分的信号采集方式,在像素的曝光时间内不断收集接收光子的能量,而不去区分具体光子到达的时间,也就无法区分光子的具体飞行路径所对应的飞行时间,则会存在多径干扰问题 。同理,在物体边缘所对应的成像像素区域,会同时接收前景和背景反射回来的光线,所收集的光子能量叠加在一起,进而去解算一个平均的相位差,得到的是平均ToF值 。因此,从技术原理上iToF一定会存在物体轮廓不清、棱角形状失真、无法区分相邻两物体等问题,为了缓解这类问题,需要对初始深度做比较重的后处理算法,但会增加AP负担,且可能影响实时性 。
文章插图
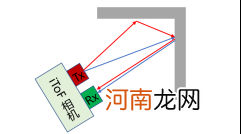
多径干扰:理想情况是按照蓝色路径进行测距,但是墙面等物体的反射光也会传播到目标物上再经过反射回到相机(红色光路),且实际会存在多条路径
多径干扰(Multi-Path)是iToF存在的严重的问题之一,这一问题目前很难缓解,会导致比如深度错误,直角变圆角,镜像等问题 。而dToF受益于其测量原理,则没有这一担忧,非理想路径的其他路径能够很容易地被滤除 。
基于高偏置SPAD的dToF技术
文章插图
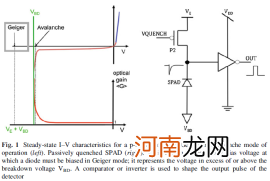
SPAD工作原理及光电特性[1]
dToF技术则实现了对飞行时间Δt的直接测量,采用脉冲信号方式,sensor内部的每一个像素都直接测量达到光子的往返时间,具有灵敏度高的优点,避开了测量往返信号的相位差所引入的各种问题,并且不存在光电子积累的过程,其测量精度受光噪声的影响比较小,较低的信噪比要求有利于系统功耗的下降 。dToF系统需要一个高速的光电探测器和高精度的时间数字转换电路,即SPAD+TDC的组合,其中SPAD是单光子雪崩二极管Single Photon Avalanche Diode,这是一种能够在ps(10-12s)级的时间内对微弱光信号产生强响应的器件,其原理是高偏置,深势阱的结构可诱发单光子产生雪崩电流,这也是为什么自动驾驶中的Lidar系统必须使用雪崩二极管来探测远距离反射回来的光信号,而一般CMOS sensor是很难做到的 。TDC是时间数字转换器Time Digital Converter,类似于日常生活中的秒表,能够记录光子每次‘折返跑’的时间 。
文章插图
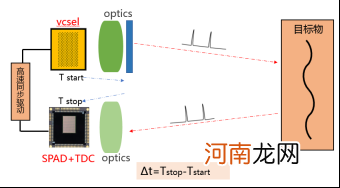
dToF系统示意图
dToF激光发射端采用极窄脉冲调制方式,单个发光脉宽可达数百皮秒级别,占空比可低至0.1%,因此发射端的平均功耗比iToF低很多 。发射端通过高速信号连接与接收端的TDC进行精准时间同步,发射光经过前方目标折返后,处于接收端的SPAD sensor能对光信号进行ps级的超高速光电转换,产生脉冲电流,这一脉冲电流会将计时‘掐断’,此时TDC即可直接得到光信号的飞行时间Δt 。由于是直接对飞行时间进行测量,不存在解析相位差精度与频率的反比关系问题,因此dToF在信噪比能保证的情况下精度不随距离增加而下降 。
- 总在裁员的大疆
- 新疆马蹄打了北鼻是什么意思
- 新疆人古丽是什么意思 新疆古丽什么意思
- 新疆乌鲁木齐八钢属于哪个区 八钢属于哪个区
- 阿塞拜疆进一步放松疫情管控措施
- 重庆银行等6家企业首发过会 重庆银行将成为今年第二家在A股成功IPO的银行
- 新疆薰衣草几月份开花 新疆薰衣草几月开花
- 「白疆」名字吉凶运势_「白疆」姓名含义详解
- 「白疆栋」名字吉凶运势_「白疆栋」姓名含义详解
- SIE高管重申:PS5会在今年推出 首发阵容无比强大