文章图片
图源:论文
机械手的研发有许多成功的例子,这些手可以做各种各样的事情,比如:感知物体、触摸拿起物件、自由移动,甚至还可能在不到90秒的时间内,通过超级马里奥游戏的第一关。
近日,据外媒报道,斯坦福大学的工程师创造了一种新的机械手,其指垫设计受壁虎的启发,能够以恰到好处的力度抓取物品。
研究人员解释,拟人机器人的机械手具有很高的抓取移动性和任务灵活性,但难以与平行钳口夹持器的实际强度相匹配。
因此,有一种受壁虎启发的粘合剂是很有潜力的技术,可以跨越性能差距,但必须保持三个关键原则才能有效使用:高接触面积、剪切载荷共享和均匀分布的正应力。这项研究工作提出了一种拟人化的末端执行器,它将这些粘合原理与多指设计的流动性和刚度相结合。
这个新的机械手有一个关键属性,那就是粘手指。在这种情况下,“粘性”不是胶带中的那种粘性,而是一种利用微小分子之间的吸引力,并模仿现实生活中壁虎手指的物质。
这种新颖的人造壁虎粘合剂不会粘在所有东西上,它只有在朝着某个方向拉动时才有效。这意味着它非常适合攀爬。
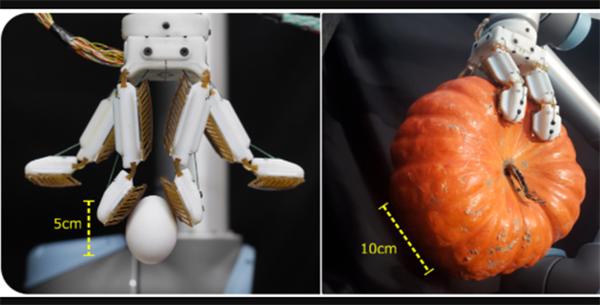
这个新的机械手足够柔软,可以拿起鸡蛋,同时又有足够支撑力,不会让它掉下来。这是一个很难达到的平衡,但研究小组做到了。
题为From grasping to manipulation with gecko-inspired adhesives on a multifinger gripper的相关研究论文发表在《科学-机器人》期刊上。
前瞻经济学人APP资讯组
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系)
【机械手|厉害了!斯坦福新型“机械手”:可灵活抓取鸡蛋,不捏碎】
252
- 轻轻拍打屁股其实不算很疼,为什么小孩子哭那么厉害?
- 同事|这种“中国式哄睡”容易伤害孩子的大脑,家长别害了娃还不自知
- 大寒前后气温下降的厉害孩子要注意保暖,多吃家常菜,御寒防病
- 宝宝处于大运动发育,家长一定要注意,别让大意害了孩子
- 名单|厉害!龙湾这三所幼儿园,出名了!
- 小宝|3岁小男孩,昏迷不醒,住进重症室,奶奶的无知,害了孙子
- 发脾气|孩子发脾气,讲道理无效,是否该严厉惩罚?如何把握严厉的程度?
- 孕妇|孕晚期只能左侧睡?盲目坚持会害了娃,这样睡对胎儿有好处
- 宝宝|宝宝拍完百天照,医院下达病危通知为了纪念,你可能是害了孩子
- 胎儿|有时候感觉宝宝动的比较厉害,有时候又比较安静,这样正常吗