也就是说,如果无法将目标分类(classification,也可以通俗地说是识别 recognition)就无法探测 。
如果无法识别目标就认为目标不存在,与盲人无异——车辆会认为前方无障碍物,然后不减速直接撞上去 。
什么状况下无法识别?有两种情况:
第一种是训练数据集无法完全覆盖真实世界的全部目标,能覆盖 10% 都已经是很不错了,更何况真实世界每时每刻都在产生着新的不规则目标 。
特斯拉多次事故都是如此,比如在中国两次在高速公路上追尾扫地车(第一次致人死亡),在美国多次追尾消防车 。
第二种是图像缺乏纹理特征,就像摄像头面前放一张白纸,自然识别不出来是什么物体 。
某些底盘高的大货车的侧面在某一时刻或者一堵白墙,就是白纸一样,基于深度学习的机器视觉此时就如同瞎子,不减速就直接撞上去 。
此外,静止目标对深度学习也是一个棘手的问题 。
为了提高识别效率,机器视觉尤其是基于深度学习的机器视觉,需要先框选出运动目标,同时也为了防止误判,必须将运动目标和静止目标分开 。
例如,有些道路两侧停满汽车,运动目标的优先级自然高于静止目标,然后再去识别,通常是背景减除、三帧法或光流法,有时需要 1-2 秒时间,然而事故可能就发生了 。
【被特斯拉弃用的立体双目路线,为什么丰田、奔驰、华为、小鹏纷纷采用?】
文章插图
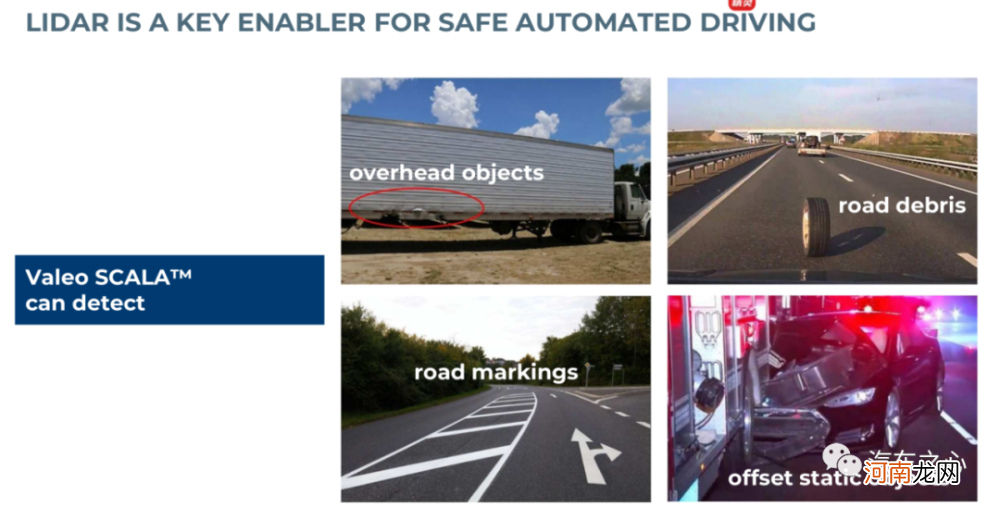
这个问题的解决办法,需要传统非深度学习算法,特别是立体双目和激光雷达,可以做到不分类也能探测目标的信息,无法识别就变瞎子的问题可以完美解决 。
不过,这些技术掌握在丰田、奔驰这些真正的顶级大厂手中 。

文章插图
特斯拉在美国撞上翻倒的静止的卡车
从本质上讲,深度学习是一种高度通用且极为强大的曲线拟合技术,能够识别出以往无法被发现的模式,推断趋势并针对各类问题给出预测性结果 。
当然,曲线拟合在表示给定数据集时也存在一定风险,这就是过度拟合 。
具体来讲,算法可能无法识别数据的正常波动,最终为了拟合度而将噪音视为有效信息,并且深度学习是个黑盒或灰盒,调参更像是艺术而非科学 。

文章插图
特斯拉在台湾撞上静止的侧翻的大货车
再有就是毫米波雷达,目前量产车的毫米波雷达角分辨率太低,对金属物体又过于敏感,为避免误动作,所有的毫米波雷达都会将静态目标过滤掉 。
此外,毫米波雷达安装的角度也很低,遇上底盘比较高的大货车,可能会检测不到 。
即将上市的宝马 iX安装的大陆ARS540 4D毫米波雷达角分辨率高,且是目前唯一能真正测高度的毫米波雷达,不过滤静态目标 。
即便毫米波雷达不过滤静态目标,以辅助驾驶的设计原则,宁漏检不误检,恐怕也不会启动 AEB 。

文章插图
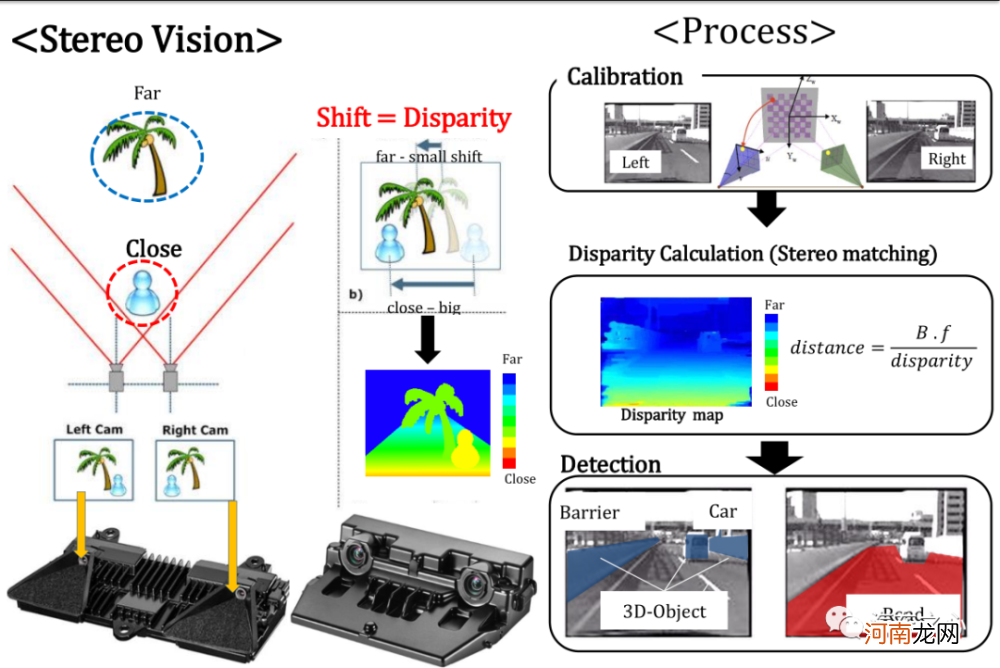
特斯拉撞的静止消防车和警车不胜枚举,立体双目就不会出现这种情况,它无需识别也可以探测障碍物 3D 信息,还可以预测其行动轨迹 。
文章插图
图片来自丰田工业大学、电装、SOKEN 的双目研发成绩汇报
激光雷达的缺点是其点云比较稀疏,即便是最强的Luminar 激光雷达也难以和 100 万像素的摄像头比 。
- 德国供水公司称特斯拉柏林工厂将耗尽当地水资源
- 特斯拉要求车主签“不转卖承诺函”,回应了!律师:应属无效
- 特斯拉回应下单多辆车需签不转卖承诺函:为了防黄牛
- 苹果入榜最受信赖电动汽车品牌,几天前刚被曝解散汽车团队
- 继特斯拉调价后,比亚迪也涨价了,网友:油加不起,车也买不起
- 最受信赖的自动驾驶电动汽车品牌调研:特斯拉第一 苹果意外上榜
- 特斯拉广州公司增加蓄电池回收等业务
- 上调1.8-2万不等 特斯拉Model 3/Y再次涨价
- 玫瑰是被子植物吗
- 金鱼|金鱼喂多了会被撑死吗 为什么刚买回来的金鱼就不行了