光流表达了图像的变化,由于它包含了目标运动的信息,因此可被观察者用来确定目标的运动情况 。
丰田只用光流做自身位姿预测,实际就是配合 IMU 做 V-SLAM 。
文章插图
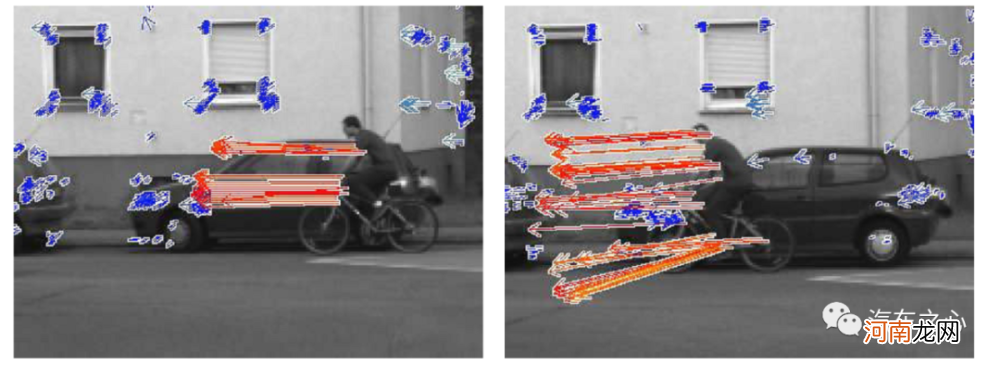
上图为奔驰的光流法,奔驰用 Stixel 降低运算量,在量产车上也用了光流追踪 。图上箭头就是骑自行车人的 0.5 秒后的移动位置,右边是 0.5 秒后的景象,可以与预测位置做一个对比 。
蓝色代表静态目标 。不仅能追踪,预测位置,还能提供目标速度 。
文章插图
奔驰推荐四种光流算法,分别是稀疏KLT、Patch KLT、Census和稠密TV-L1 。KLT 和卡尔曼滤波器配合比较好,稠密 TV-L1 的精度比较高 。
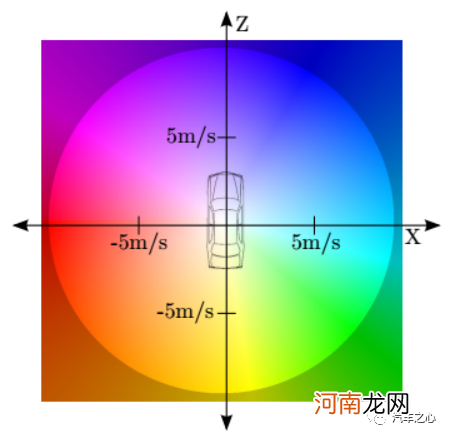
颜色编码示意图如左,不仅包括了速度还包括方位角,对移动目标位置预测非常有用 。
文章插图
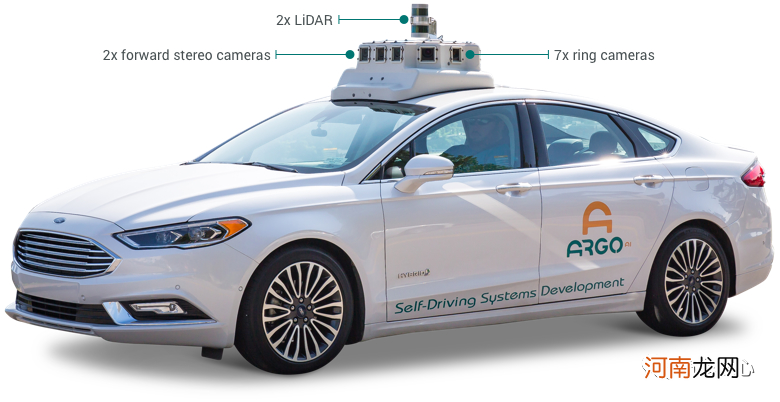
实际大众和福特也是立体双目的拥趸,上图是福特与大众合资的Argo AI的自动驾驶原型车 。
路遥知马力,时间将证明丰田、奔驰、华为、小鹏的立体双目将会超越特斯拉 。
- 德国供水公司称特斯拉柏林工厂将耗尽当地水资源
- 特斯拉要求车主签“不转卖承诺函”,回应了!律师:应属无效
- 特斯拉回应下单多辆车需签不转卖承诺函:为了防黄牛
- 苹果入榜最受信赖电动汽车品牌,几天前刚被曝解散汽车团队
- 继特斯拉调价后,比亚迪也涨价了,网友:油加不起,车也买不起
- 最受信赖的自动驾驶电动汽车品牌调研:特斯拉第一 苹果意外上榜
- 特斯拉广州公司增加蓄电池回收等业务
- 上调1.8-2万不等 特斯拉Model 3/Y再次涨价
- 玫瑰是被子植物吗
- 金鱼|金鱼喂多了会被撑死吗 为什么刚买回来的金鱼就不行了