再有就是不同物体激光反射率差别极大,同样距离下,可能一辆白色车能探测到,一辆黑色车就探测不到 。
再比如交通指示牌,激光雷达对其反射回来的高强度回波非常敏感,容易在点云中形成「鬼影」和「膨胀」 。这样的点云是不可用的 。
还有空洞,「空洞」描述的是激光雷达对于近场低矮障碍物的探测在从远到近过程中「时有时无」的丢失现象 。
障碍物原始点云「时有时无」会让感知算法难以连续跟踪,这容易导致智能驾驶的急刹车或频繁「减速加速」顿挫 。
除了空洞,还有激光雷达行业内部的术语「吸点」,这就是在近距离跟车时,车牌是强反射目标,与车体的低反射目标容易混淆,测距不准,形成盲区,称之为「吸点」 。
激光雷达数据的稀疏性与非结构化,导致传统算法无法适应,深度学习这种测不准的黑盒子算法将激光雷达深度信息的高精度造成了衰减 。
摄像头的缺点是必须有足够的纹理特征,比如颜色完全一致的大货车侧面,平整的水泥路面等没有纹理特征的目标,单目摄像头会完全失效,等于盲人,就像看到了天空一样,目中无人 。
立体双目虽然此时仍可以探测到目标,但深度信息准确度会下降 。
立体双目某种意义上也可看做一个激光雷达,其提供准确的深度信息,视差图可以转换为点云 。
因此立体双目与激光雷达融合的效果最好,远比其他种类的传感器要好,单目通过深度学习可以估算深度,但准确度远不能和测量模式的立体双目比,两者有天壤之别 。
当然,单目能做到的,双目也都能 。
那为什么特斯拉不用立体双目?宝马用了立体双目为什么又退出了?
——原因是太难用了 。
奔驰和丰田在这个领域花费了大量时间来研发 。
奔驰早在 1999 年就投入双目的研发,2013 年才在 S 级上应用 。
丰田大约也是 1999 年开始,直到 2019 年才开始在雷克萨斯上量产 。
宝马照搬德国大陆汽车的全套立体双目解决方案,效果不理想,但没有大改款的宝马 7 系还是用的立体双目 。
特斯拉这种短平快的公司自然不愿意多做技术累积 。深度学习的免费资源很多,研发周期是双目的 1/10,甚至 2/30 。
从事深度学习的人至少是双目的上万倍,双目人才奇缺,并且一切都要从头做起,几乎没有免费资源 。
国内除华为外,只有中科慧眼能帮助车企量产立体双目系统 。
电装最早的立体双目用于自动驾驶的研究论文发表在 2001 年 。【1】
奔驰则是 1996 年,没有 20 年技术累积,很难用好立体双目 。【2】
立体双目的后期处理算法几乎没有深度学习参与,大多基于纯几何的算法,这种人才罕见,一旦做成了,技术门槛很高,护城河很深 。
而深度学习只需要大量投喂数据,用大型数据中心训练就可以,可以说除了资金门槛,没有任何技术门槛 。
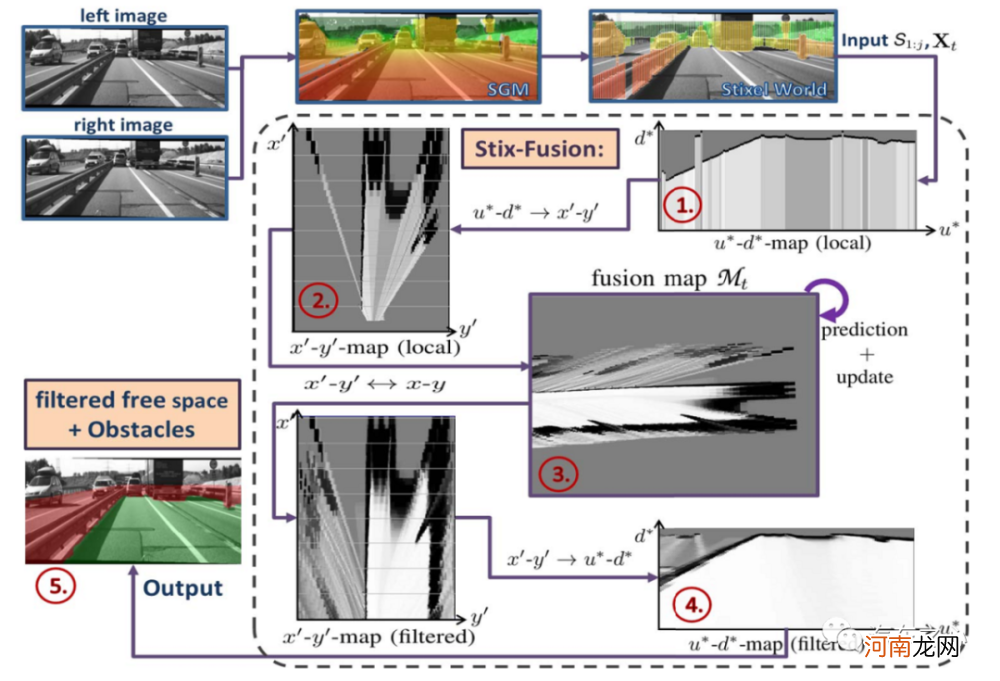
文章插图
上图为奔驰的 Road Surface Freespace Segmentation 流程图,奔驰为缩小运算量,提出Stixel概念,Stixel 算法将物体抽象成立在地面上的一根根的 Sticks, 。
这些 Sticks 将图片分割成 Freespace 与障碍物 。
Stixel 是一个细长矩形,宽度固定(3px, 5px,...),高度与障碍物相同 。
本质上,Stixel 是一种超像素抽象,介于像素与物体之间,在性能和算法复杂度上比二者有着明显的优势 。
因为立体双目具备 3D 深度信息,因此光流法就比较适合立体双目,特别适合目标追踪 。
当人的眼睛观察运动物体时,物体的景象在人眼的视网膜上形成一系列连续变化的图像,这一系列连续变化的信息不断「流过」视网膜(即图像平面),好像一种光的「流」,故称之为光流 。
- 德国供水公司称特斯拉柏林工厂将耗尽当地水资源
- 特斯拉要求车主签“不转卖承诺函”,回应了!律师:应属无效
- 特斯拉回应下单多辆车需签不转卖承诺函:为了防黄牛
- 苹果入榜最受信赖电动汽车品牌,几天前刚被曝解散汽车团队
- 继特斯拉调价后,比亚迪也涨价了,网友:油加不起,车也买不起
- 最受信赖的自动驾驶电动汽车品牌调研:特斯拉第一 苹果意外上榜
- 特斯拉广州公司增加蓄电池回收等业务
- 上调1.8-2万不等 特斯拉Model 3/Y再次涨价
- 玫瑰是被子植物吗
- 金鱼|金鱼喂多了会被撑死吗 为什么刚买回来的金鱼就不行了